
این پی ال سی علاوه بر داشتن فانکشن های آماده برای پوزیشن کنترل، قابلیتهای سری های دیگر همچون شمارنده سرعت بالا، کنترل PID ، اکسپنشن پذیری و … را نیز دارا می باشد. این یونیت، در دو نوع XCM-32T-E و XCM-60T-E موجود میباشد. در سری اول، قابلیت کنترل ۴ محور و در سری دوم، قابلیت کنترل ۱۰ محور وجود دارد. همچنین رسم شکلهای دوبعدی اعم از خط، دایره و بیضی با این یونیت براحتی امکان پذیر است.
شماتیک یونیت
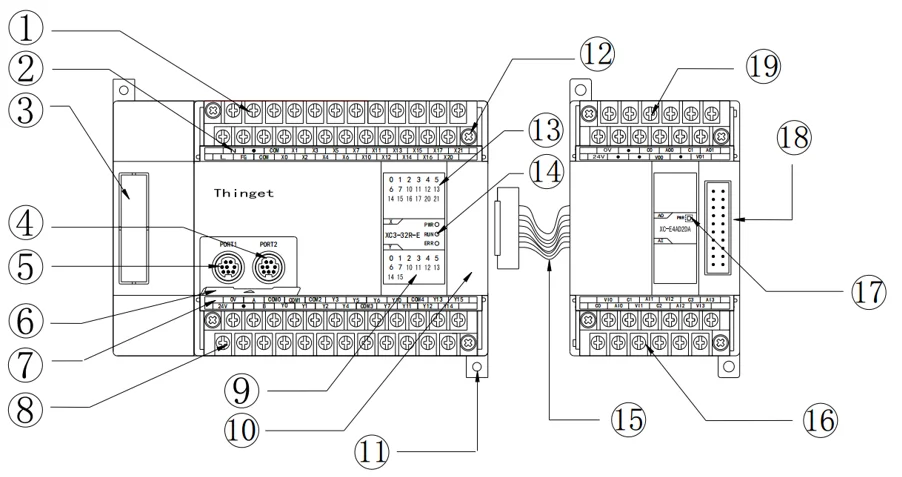
در شکل زیر قسمت های مختلف یونیت XCM-32T-E نمایش داده شده است.
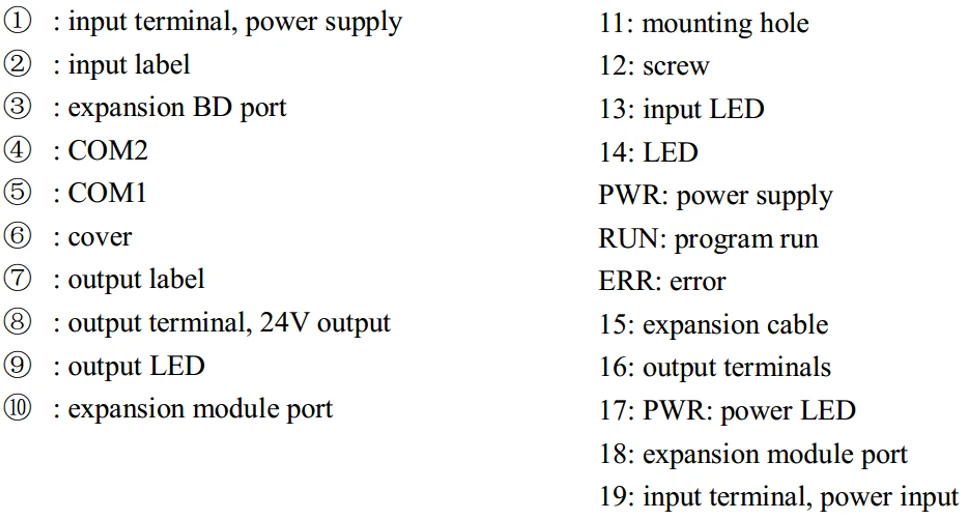
این یونیت دارای ۱۸ ورودی و ۱۴ خروجی می باشد که پایه های ان بر روی یونیت به صورت زیر نامگذاری شده است:
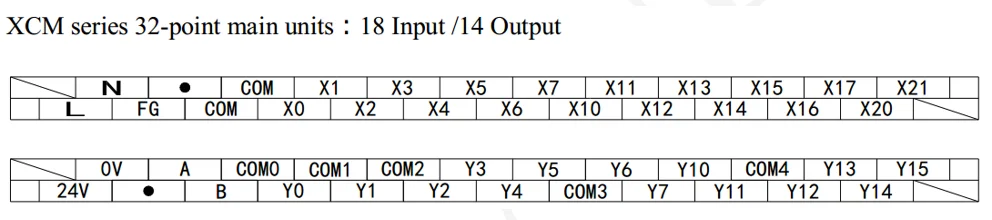
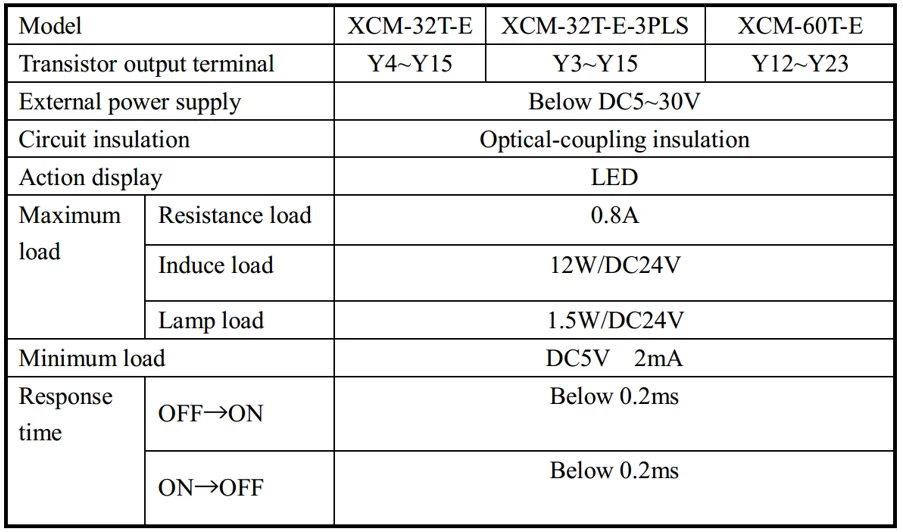
تمامی خروجی های این یونیت از نوع ترانزیستوری بوده و ۴ خروجی اول از نوع پالس با فرکانس بالا و مابقی به صورت معمولی می باشند. در جدول زیر مشخصات مربوط به خروجی های فرکانس بالا توضیح داده شده است.
لازم به ذکر است که خروجی Y1 نمیتواند به صورت همزمان با وجود BD Board کار کند.
مشخصات خروجی های معمولی این یونیت نیز در ادامه توضیح داده شده است:
اتصال به سرو درایو
برای اتصال خروجی های یونیت به سرو درایو می توان از پیکربندی زیر استفاده کرد:
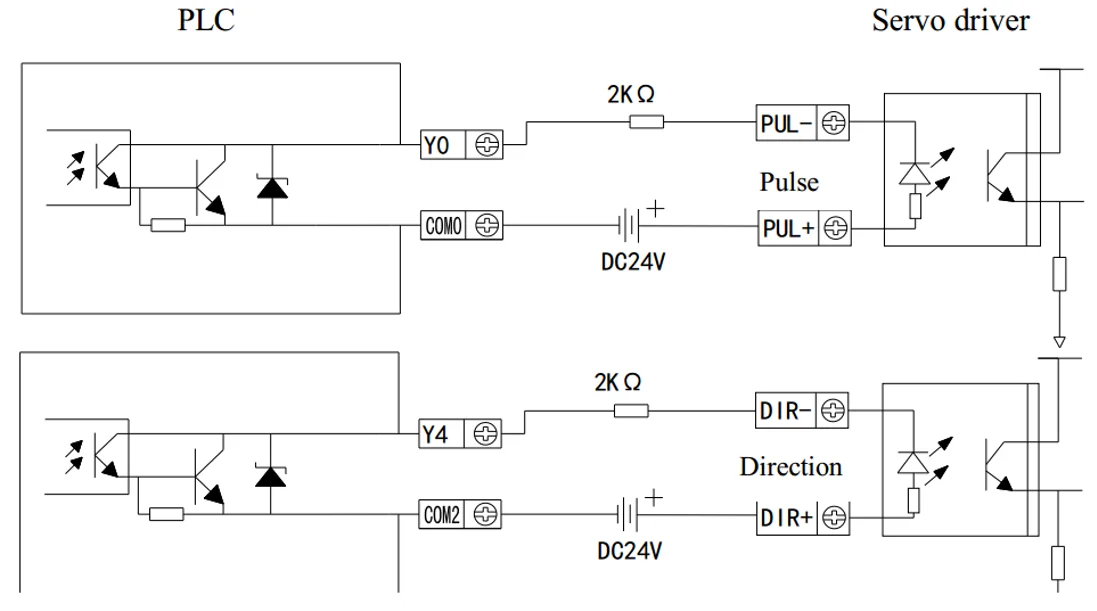
اگر در شکل بالا بجای ۲۴ ولت از ۵ ولت استفاده شود، نیازی به مقاومت ۵ کیلو اهمی نمی باشد.
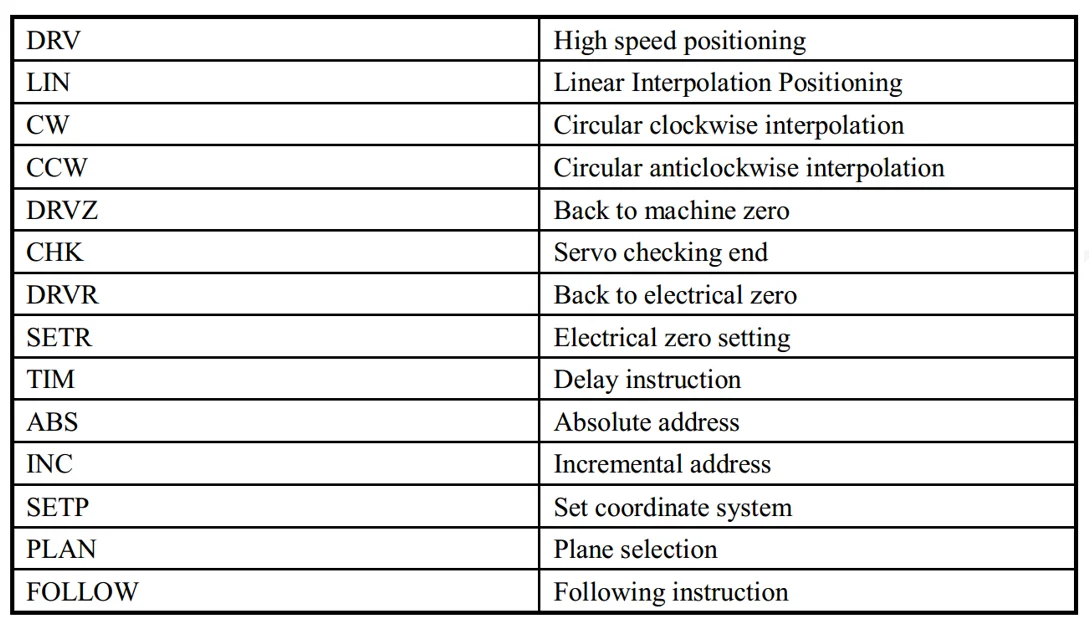
دستورات مربوط به پوزیشن کنترل در یونیت XCM-32T-E
در ادامه دستورات مربوط برای رسم اشکال مختلف در صفحه آورده شده است.
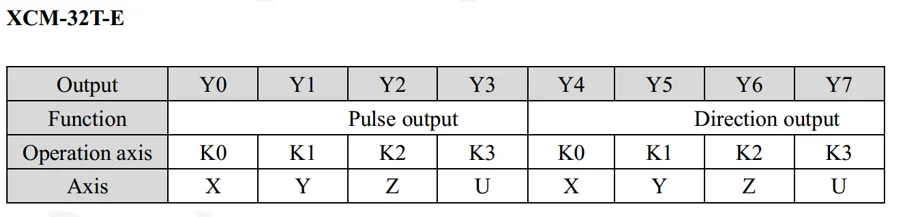
پایه های خروجی برای XCM-32T-E به صورت زیر بوده و محورهای مختصات کنترل شونده با این یونیت نیز نشان داده شده است.
در ادامه دستورات موجود در XCM-32T-E توضیح داده می شوند:
PLAN : صفحه مورد نظر برای کنترل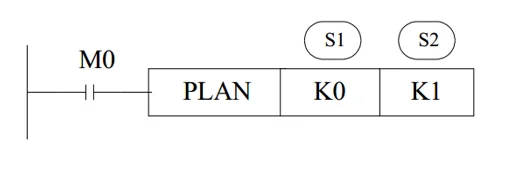
این دستور برای تعیین محورهای مختصات کنترلی بکار می رود.
S1 : نشان دهنده محور مختصات اول
S2 : نشان دهنده محور مختصات دوم
توجه شود در صورتی که از این دستور استفاده نشود، سیستم به صورت خودکار X و Y را به عنوان محورهای مختصات در نظر می گیرد.
SETP : تعیین مبدا مختصات
این دستور برای تعیین یا جابجایی مبدا محور مختصات تعیین شده
بکار می رود.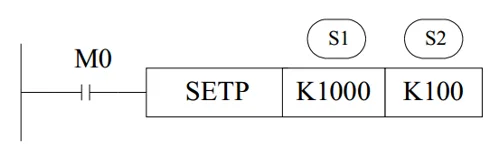
S1 : مبدا محور مختصات اول
S2 : مبدا محور مختصات دوم
مثال:
LD M0
PLAN K1 K2
SETP K10000 K20000
در مثال نشان داده شده با تغییر M0 از صفر به یک، K1 و K2 به عنوان محورهای مختصات تعیین می شوند که در واقع همان Y و Z می باشند. در خط بعد، دستور SETP مبدا محور مختصات تعیین شده را به نقطه 10000 در محور Y و نقطه 20000 در محور Z جابجا کرده و نقطه جدید را به عنوان مبدا مختصات جدید در نظر می گیرد.
ABS : مختصات مطلق
با اجرای این دستور، مختصات دستورات بعدی نسبت به (0,0) فهمیده می شود.
لازم به ذکر این دستور تا زمانی فعال است که برنامه به دستور INC نرسیده باشد.
LIN : درونیابی خطی
با استفاده از این دستور، می توان بر روی صفحه انتخاب شده به وسیله دستور PLAN و اینکه آدرسها مطلق هستند یا نسبی، یک خط کشید که در واقع نقطه انتهایی خط بر روی صفحه را توسط این دستور مشخص کرده و همچنین تعیین می شود که با چه فرکانسی این درونیابی انجام شود.

S1 : نقطه پایانی روی محور اول
S2 : نقطه پایانی روی محور دوم
S3 : نقطه پایانی روی محور سوم
S4 : تعیین سرعت انتقال برحسب فرکانس تا حداکثر ۸۰ کیلو هرتز
مثال:
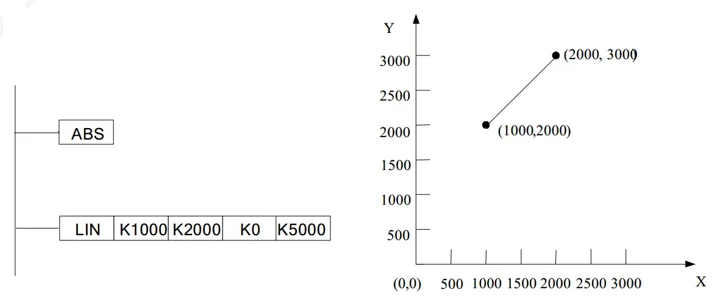
دستور بالا موقعیت قلم را به صورت خطی و با سرعت ۵ کیلوهرتز به نقطه (1000.2000) منتقل می کند.
INC : آدرس دهی نسبی
با اجرای این دستور، مختصات دستورات بعدی نسبت به نقطه فعلی تغییر خواهد کرد.
مثال:
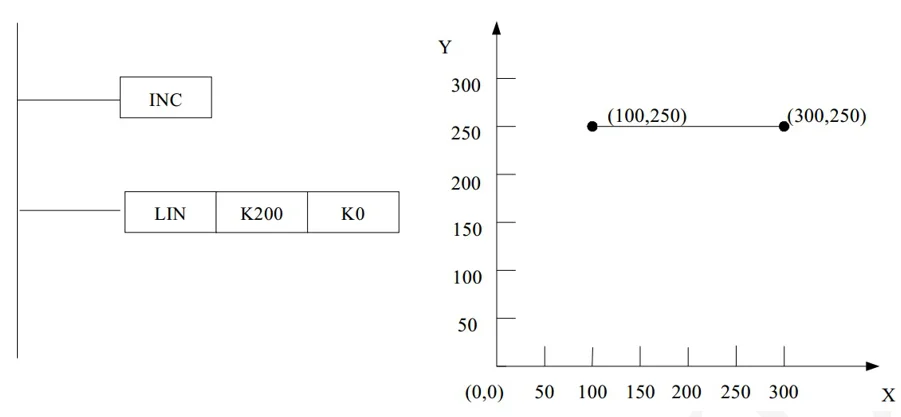
دستور بالا موقعیت قلم را از نقطه فعلی به صورت خطی در جهت محورX به اندازه ۲۰۰ واحد انتقال می دهد.
CW/CCW : درونیابی دایروی
با این دستور می توان دایره ای با سرعت مشخص با توجه به موقعیت مرکز دایره و نقطه نهایی ترسیم نمود.

S1 : نقطه پایانی روی محور اول
S2 : نقطه پایانی روی محور دوم
S3 : نقطه مرکز دایره در راستای محور X
S4 : نقطه مرکز دایره در راستای محور Y
S5 : مربوط به موقعیت محور سوم مختصات
S6 : تعیین سرعت انتقال برحسب فرکانس تا حداکثر ۸۰ کیلو هرتز
توجه:
- اگر مقدار سرعت تعریف نشده باشد سیستم با سرعت ماکزیمم حرکت می کند.
- اگر موقعیت شروع و موقعیت پایانی یکسان در نظر گرفته شود شکل ایجاد شده یک دایره کامل خواهد بود.
مثال:
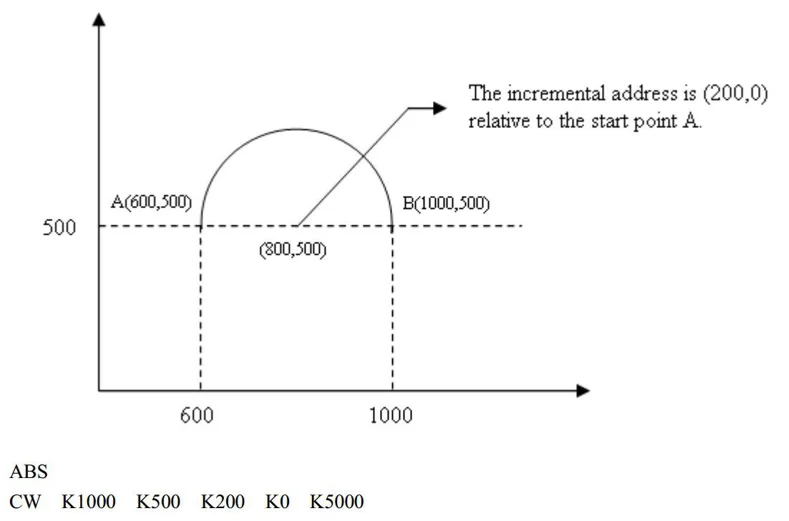
در دستور بالا نقطه پایانی (1000,500) و شعاع دایره (200,0) انتخاب شده بنابراین نقطه آغازین حرکت نسبت به مرکز مختصات (600,500) و نقطه مرکز دایره (800,500) محاسبه می شود. فرکانس کار هم ۵ کیلو هرتز در نظر گرفته شده است.
CHK: اعلام وضعیت اتمام دستور قبل
مثال:
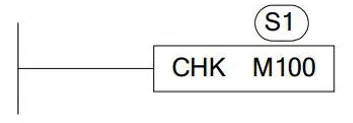
دستور بالا بررسی می کند که اگر وضعیت دستور قبلی به پایان رسیده باشد مقدار M100 را یک میکند.
TIM : تاخیر در اجرای دستورات
S1: زمان تاخیر



